
Write-up Coming Soon
Version 1
Stepper motors upgraded, time of flight sensors connected, 2 Decawave UWB boards being used for localization.
Version 2
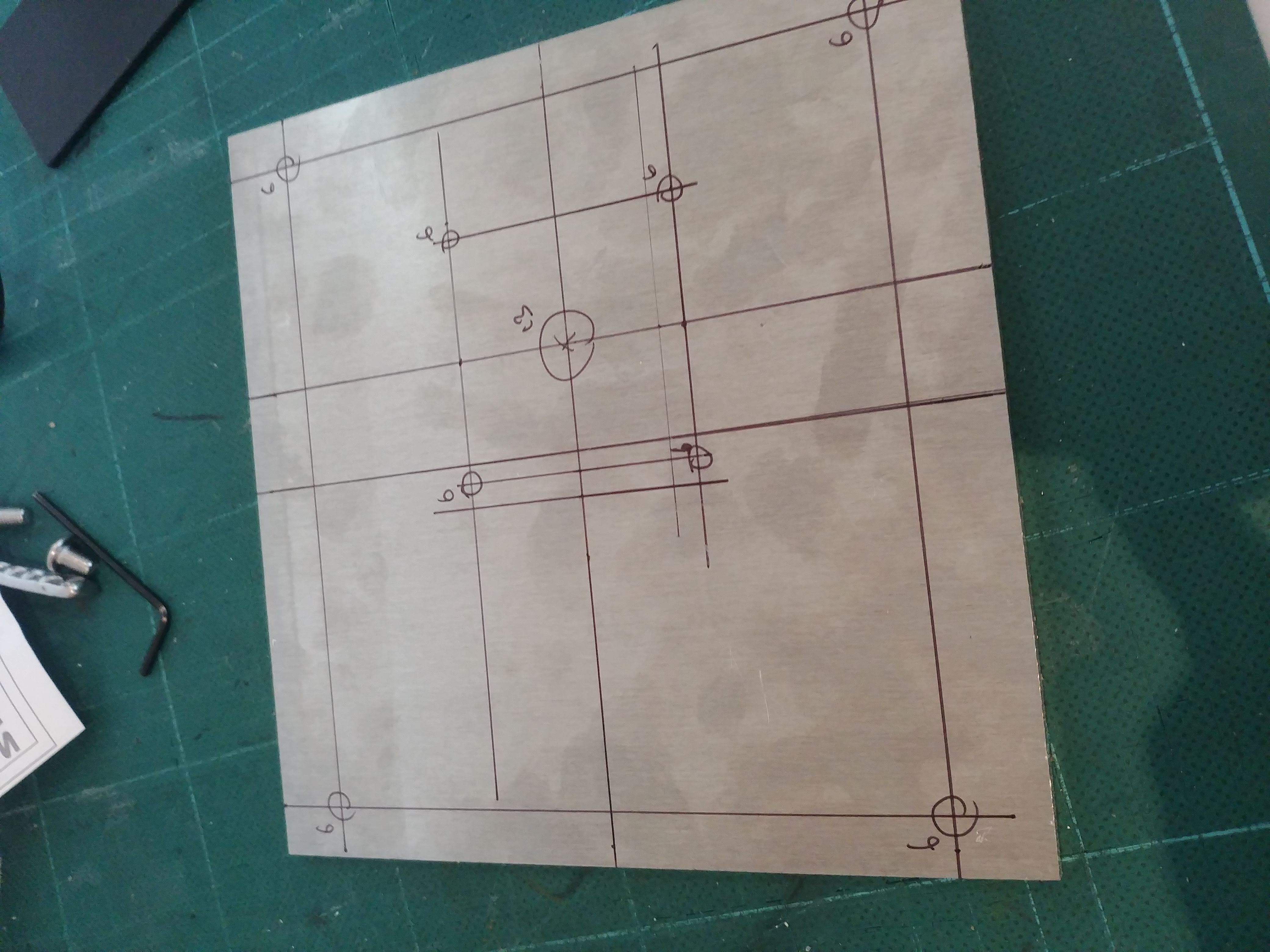
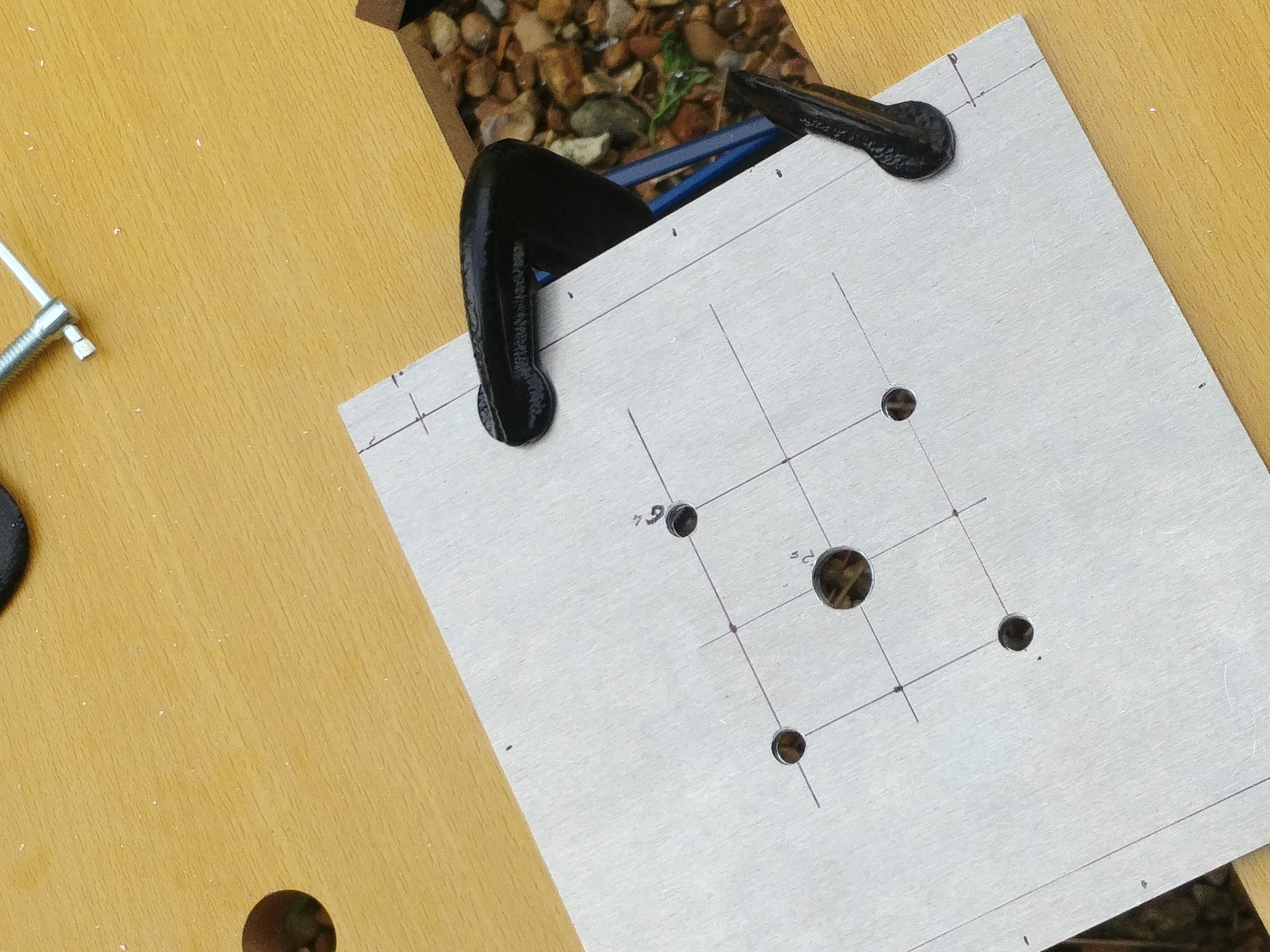

Frame designed + cut. Extreme prescision here as can clearly be seen.

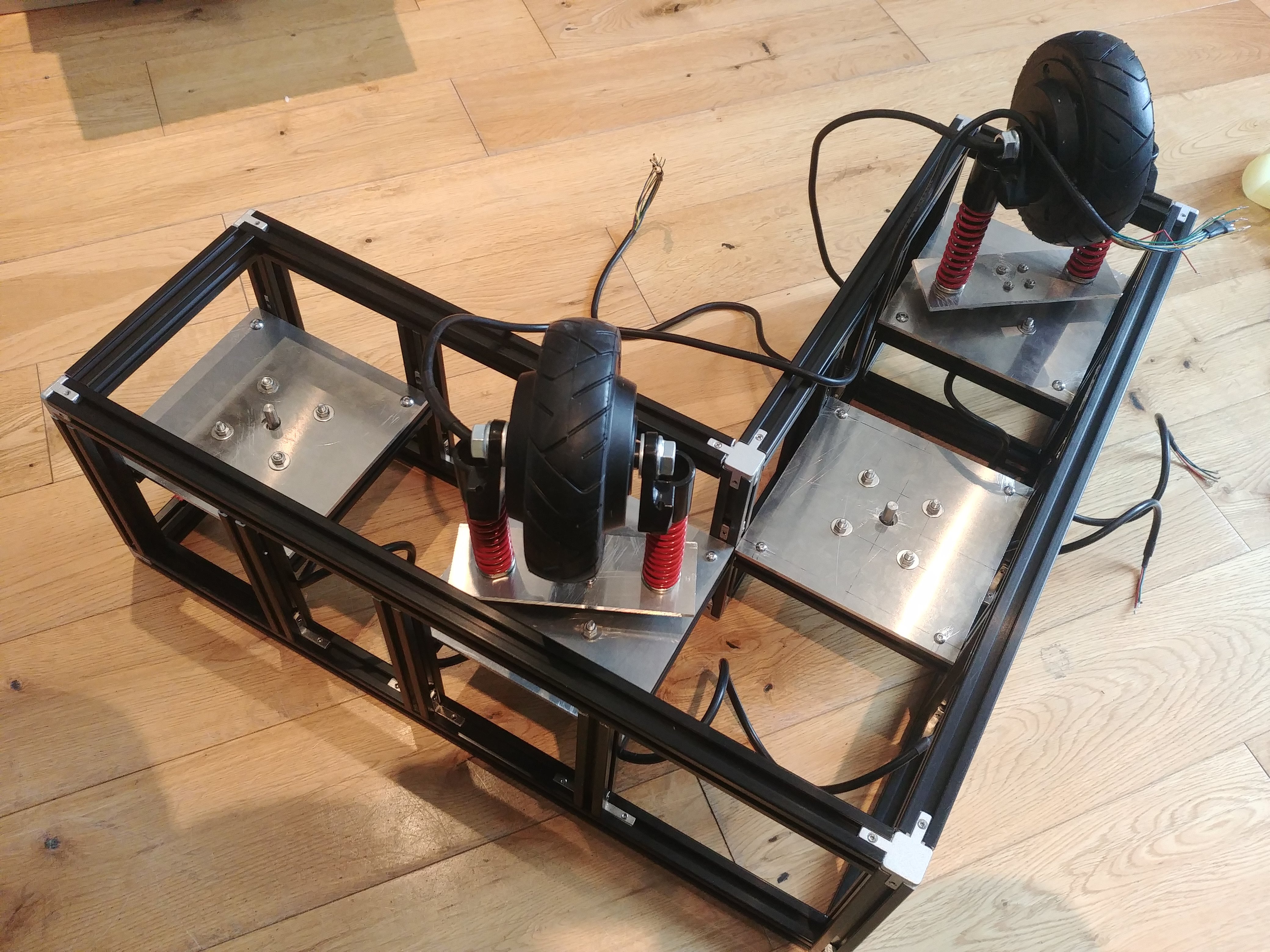
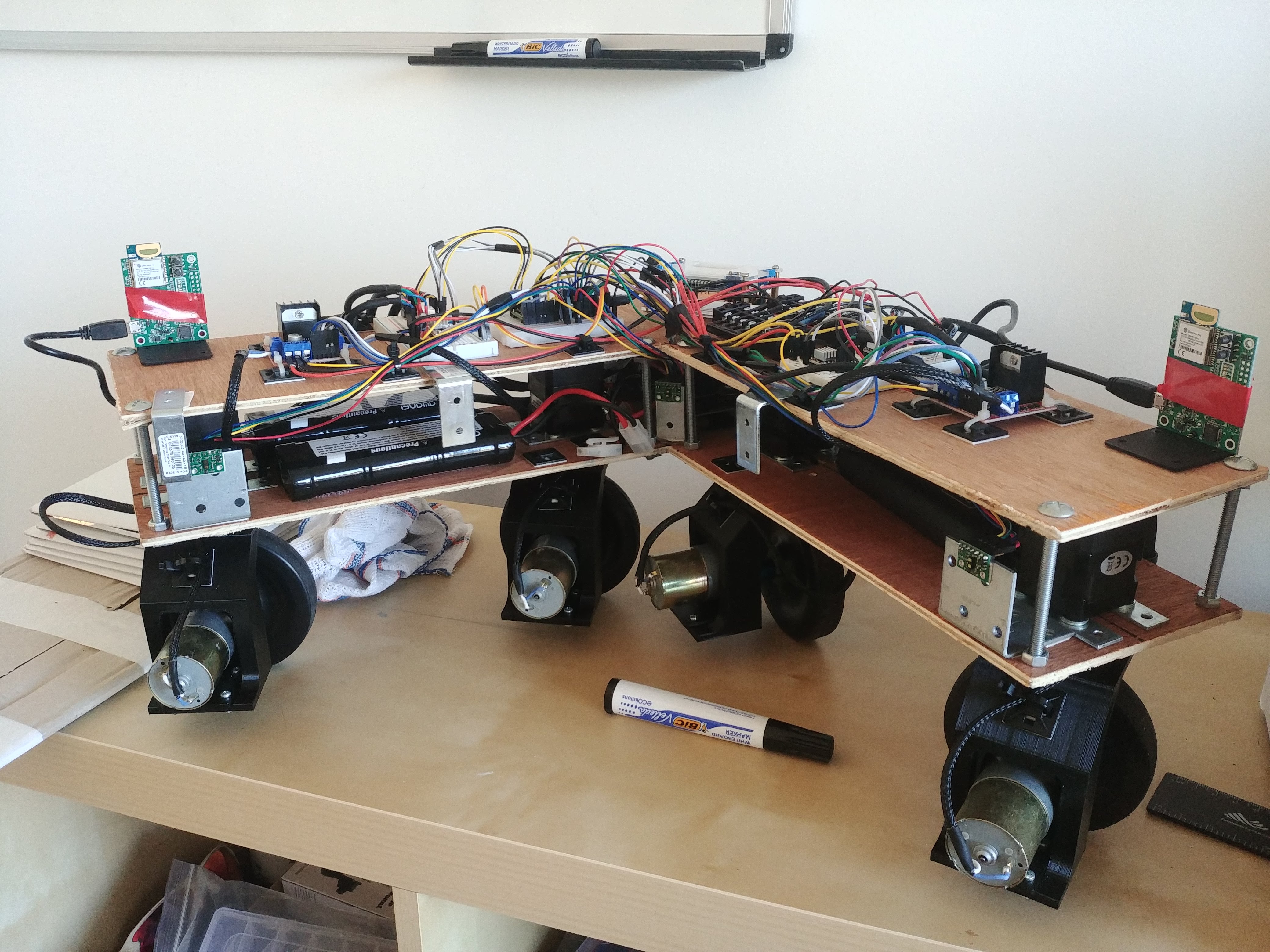
Basic frame put together and support for wheels designed + attached.

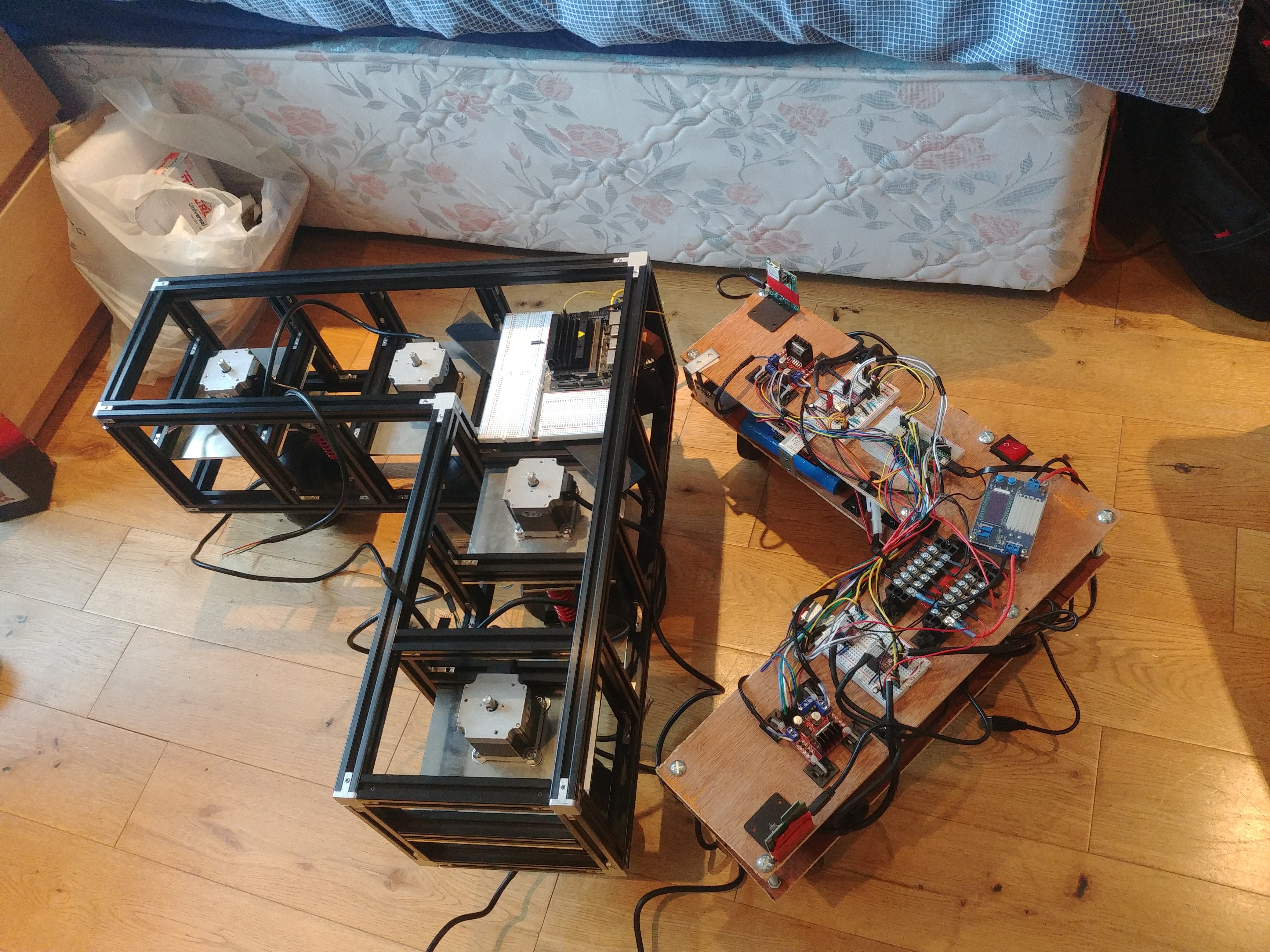
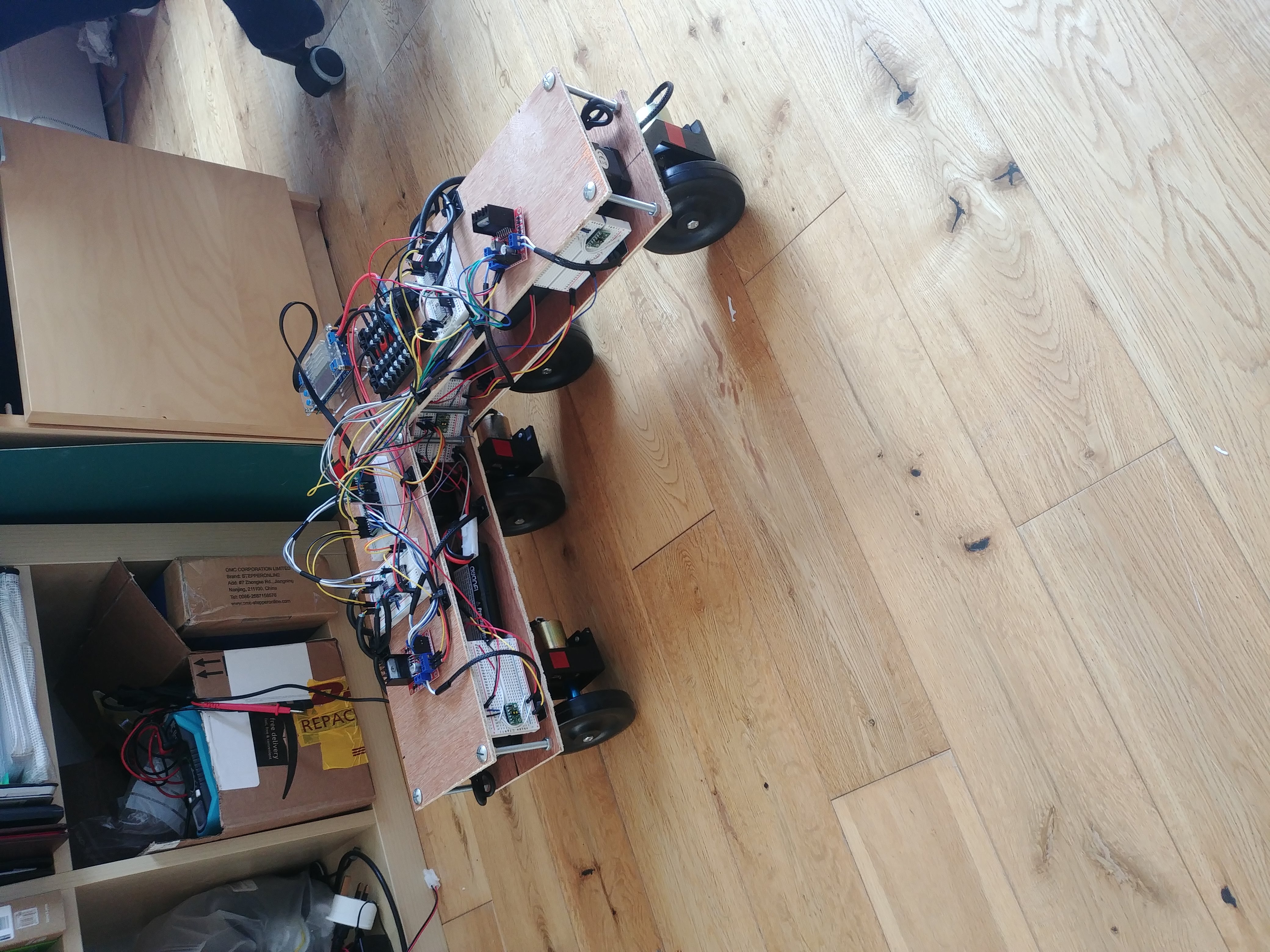
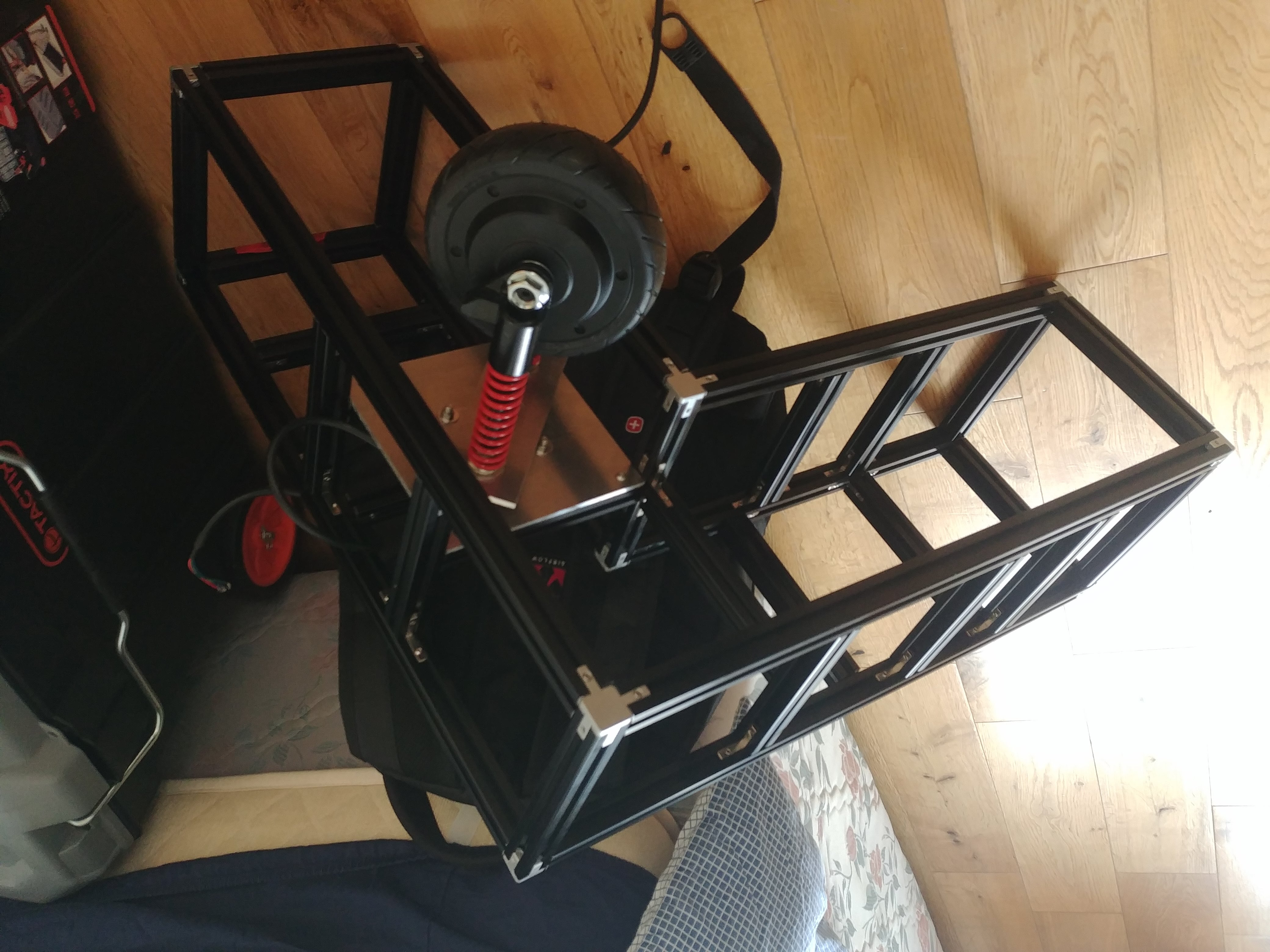
Quick comparison of V1 and V2.
V1: ~10kg
V2: ~25kg, 4x 250W DC motors
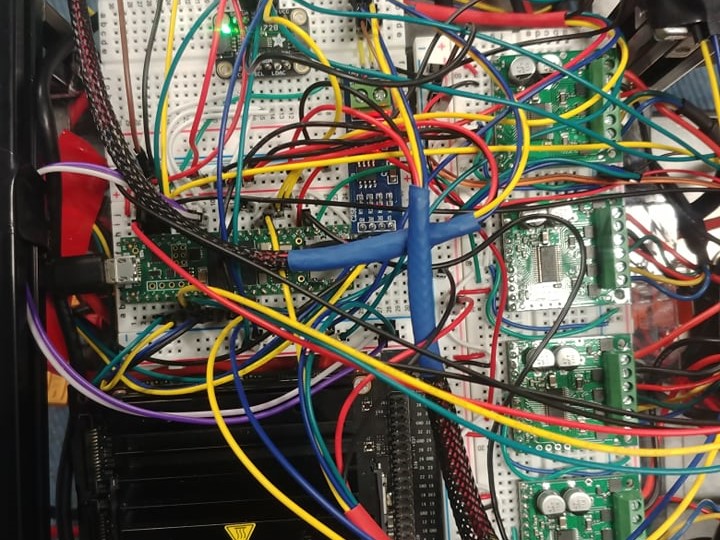
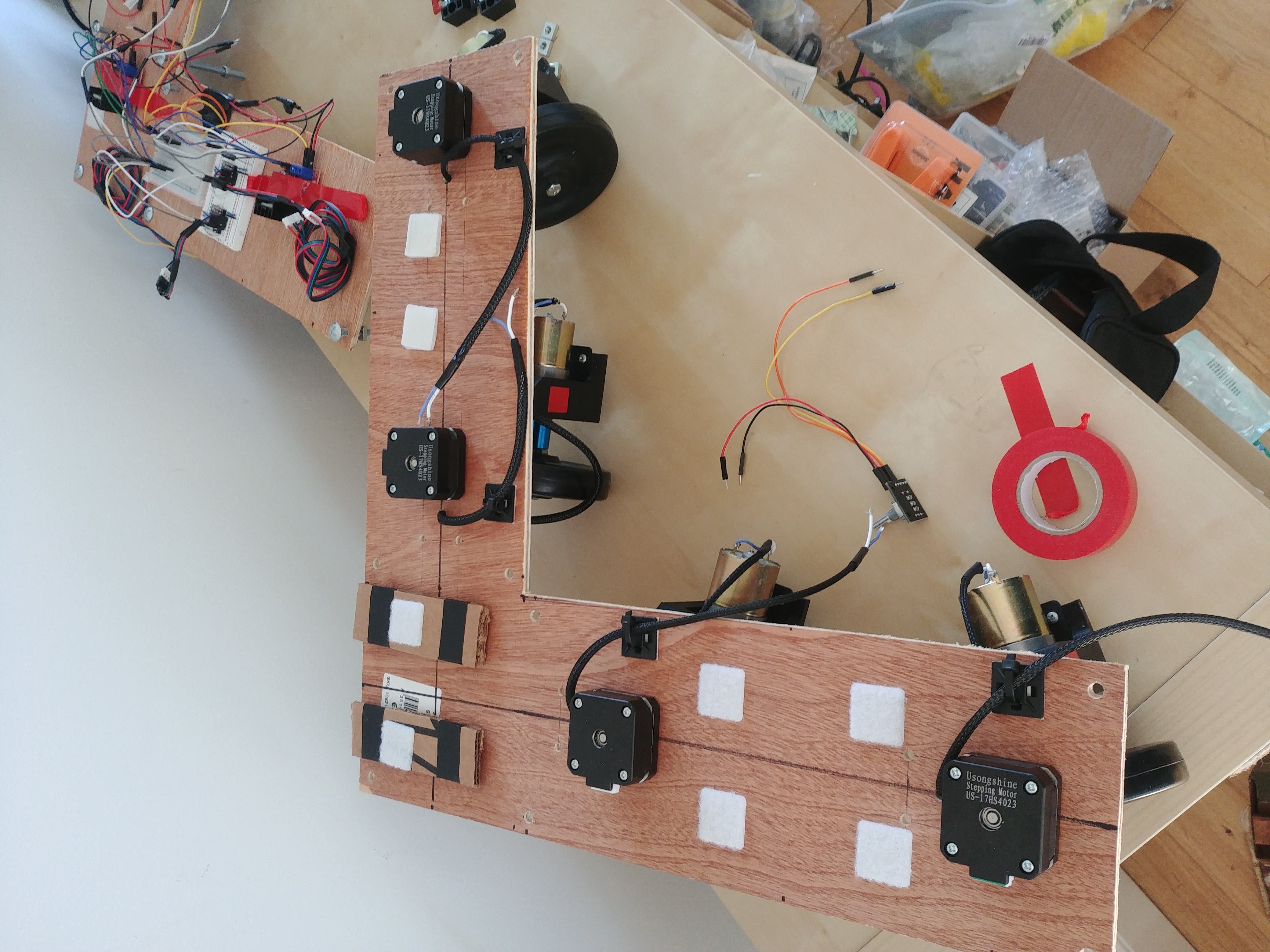
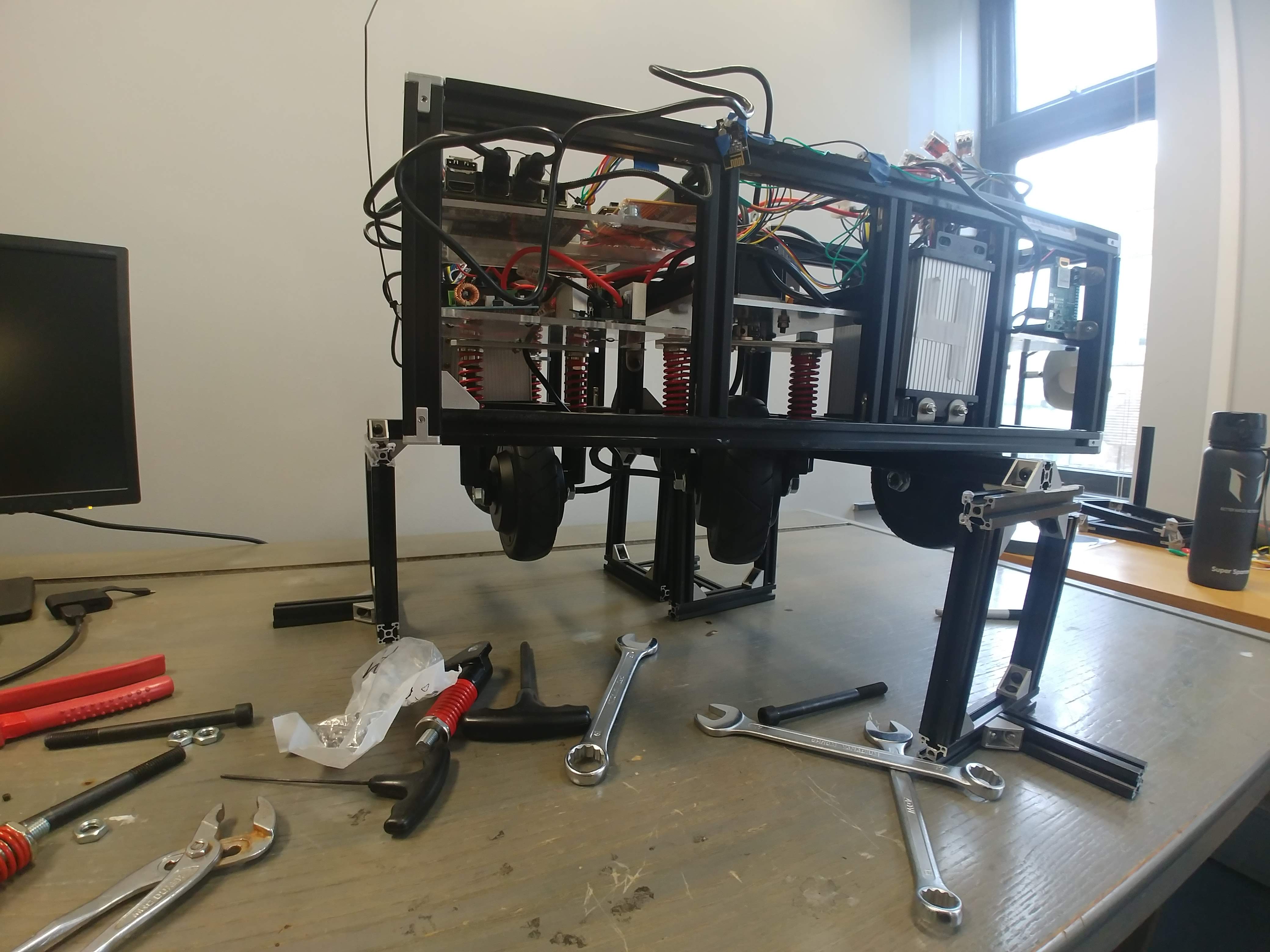
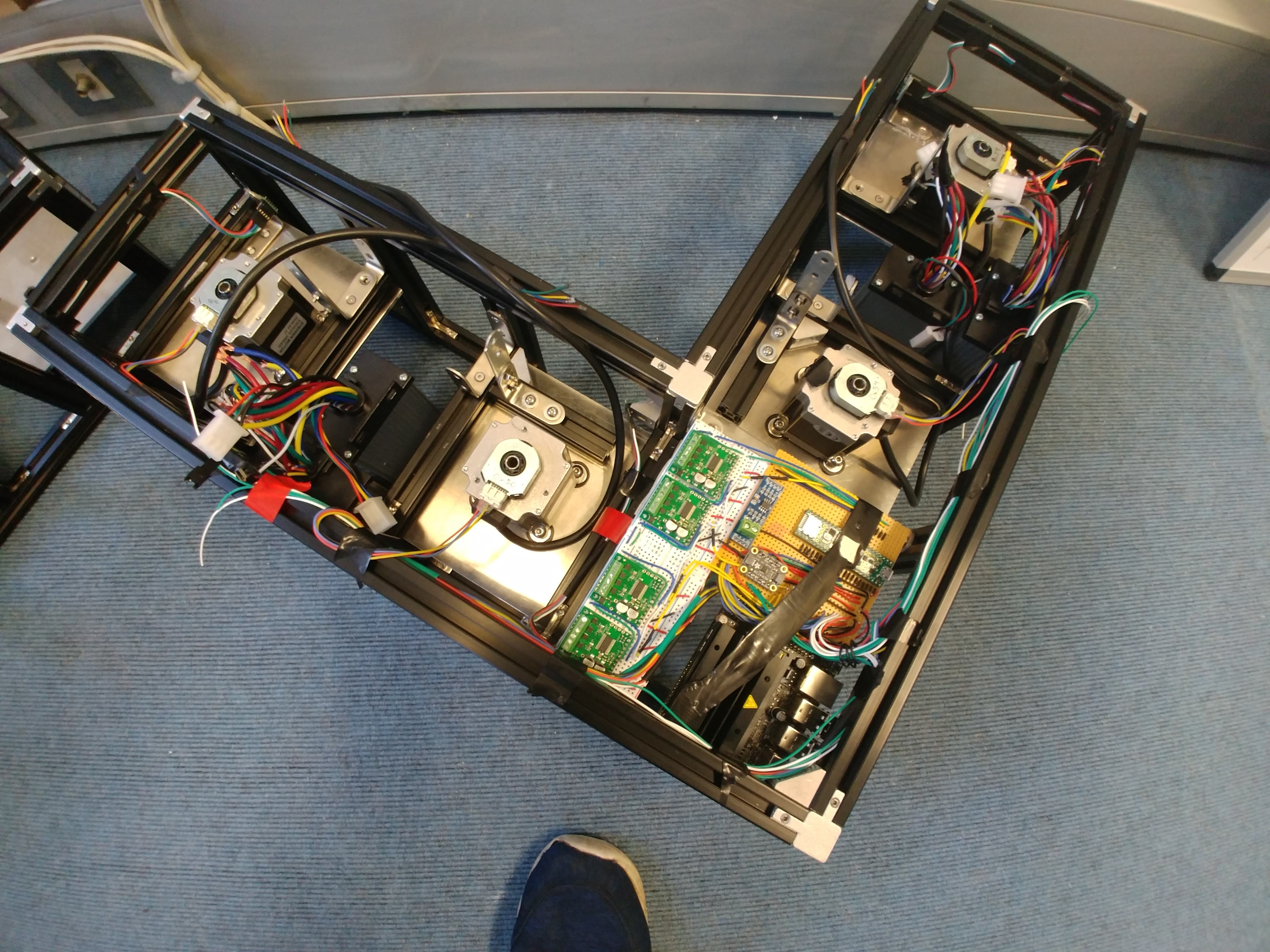
Electronics & wiring iteration. It's far too easy to keep adding features and components to the initial prototype without taking a step back and actually cleaning things up first. Breadboards are perfect for testing out different components but if the wires start to look like a birds nest it's time to clean things up.
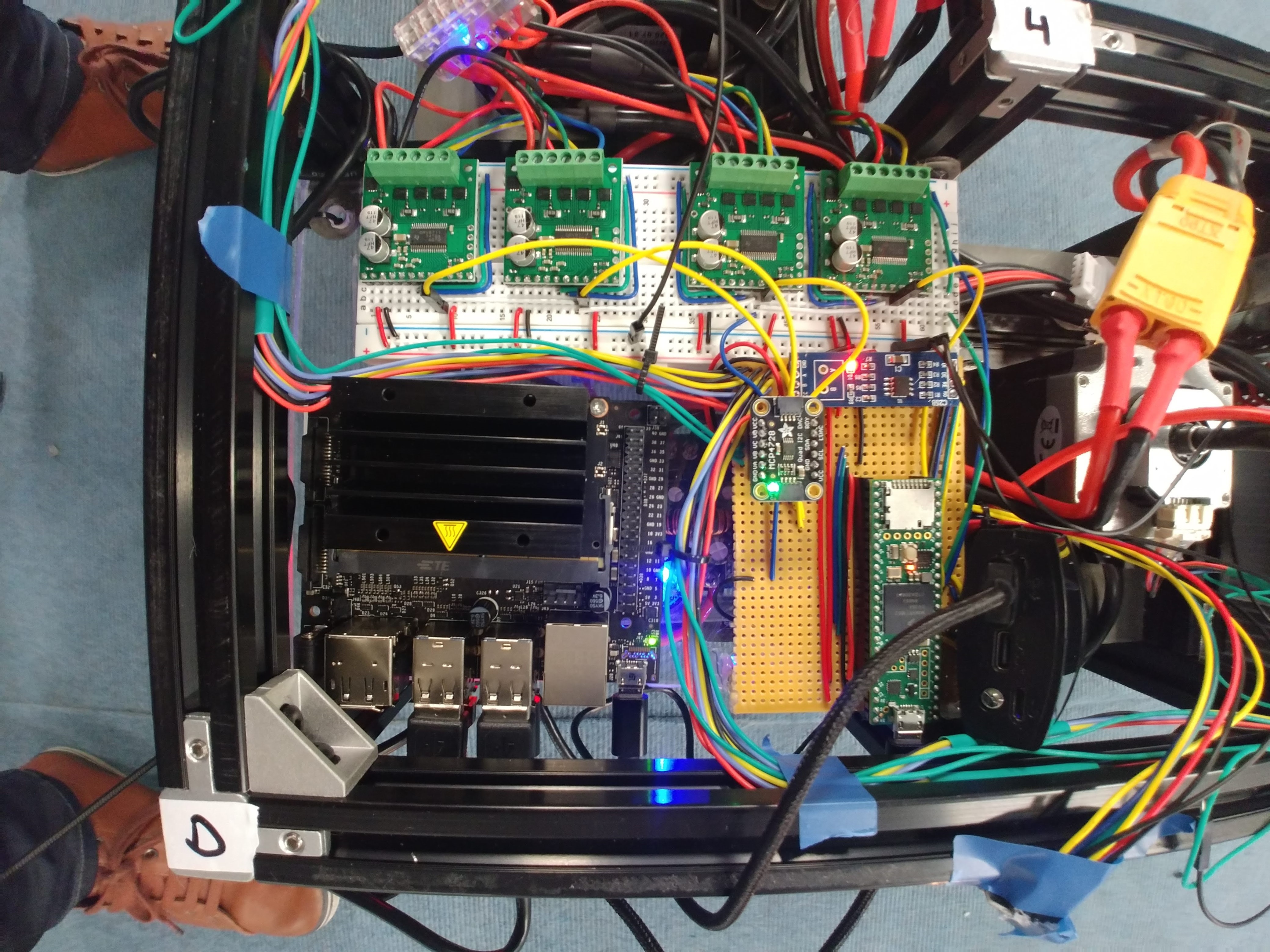
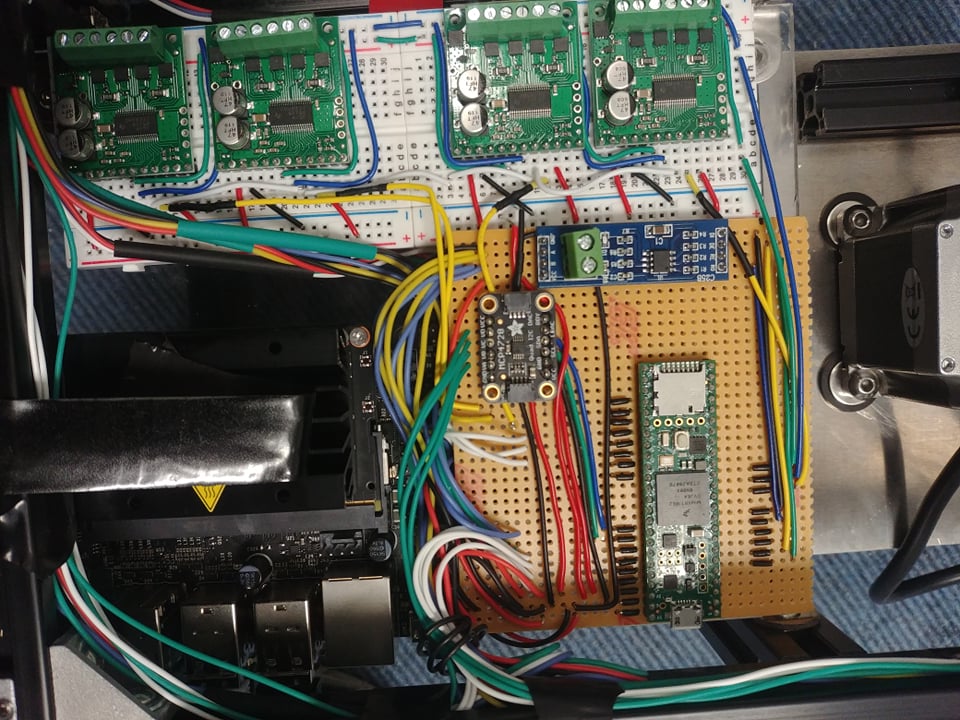
The green boards at the top are the high power drivers for the stepper motors, the black board is a 4 channel DAC , the blue board is to convert to rs485 to talk to the AMT encoders on the stepper shafts, the green board is a teensy 4.1. The big heatsink is the NVIDIA Jetson Nano, probably overkill at this stage but works great.
Second pass at prototype version 2. Encoders on stepper motors (solid shaft replaced with hollow shaft - this was a pain), electronics mostly wired up, time-of-flight sensors attached. Just missing wheels, UWB boards, batteries, regulators and power wiring.